Overview
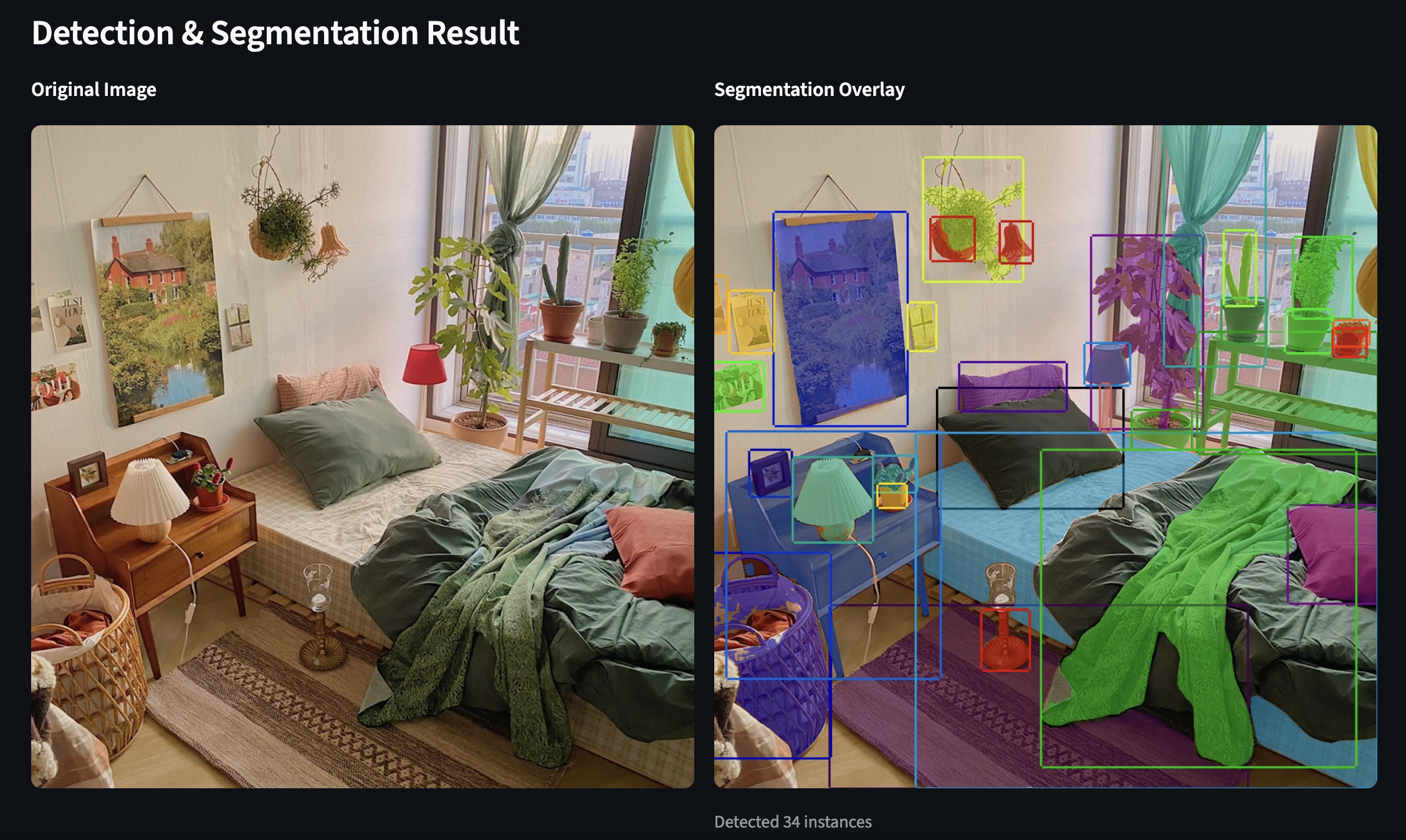
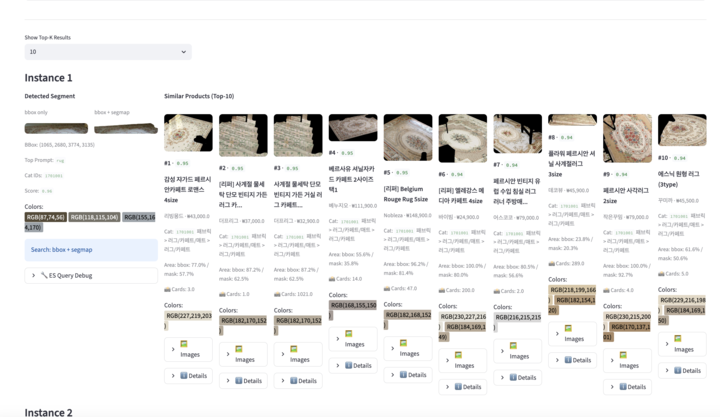
At Bucketplace (오늘의집), I built an end-to-end segmentation-to-indexing-to-retrieval pipeline that detects and separates multiple furniture/decor instances from room scene images, connects them to the product index, and achieves performance far beyond naive image-to-image similarity. The project also established the foundation for a 3D object retrieval-based digital twin pipeline.
Key Achievements
- DetectRate@10: 2.06% to 28.08% (13.6x improvement over baseline)
- Lead Time Reduction: 2 weeks to 3 days for segmap refinement pipeline
- Defective Image Removal: 56.7% defective images removed (more than 2x yield)
- Catalog Scale: 80K to 440K products (5.5x expansion, filtered from 700K for quality)
- Category Coverage: 154 to 277 categories (+80%)
- SAM3D Pipeline: ~1/100 cost vs outsourced Image-to-3D
- 3D Collaboration: 6,000x cost reduction and 2,200x production increase
- VLM Refinement Optimization: Switched from QWEN3 8B (1 week+ GPU) to GPT-5-nano with reasoning, completing refinement in 2 days via API parallelization
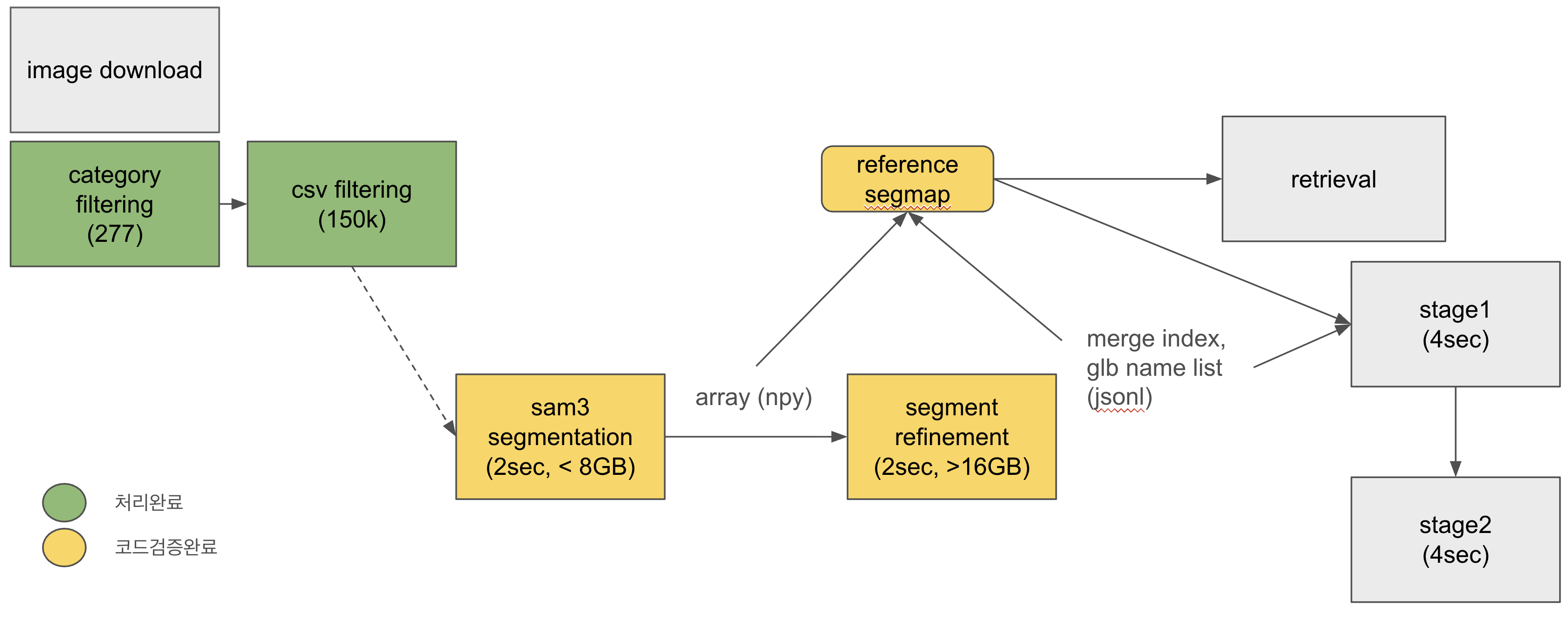
Technical Approach
Retrieval Pipeline Architecture
The pipeline follows a multi-stage approach:
[Room Scene] → [Object Detection] → [Query Generation] → [Product DB (ES) Search] → [Post-processing] → [Results]
v1 to v2 Improvements
| Component | v1 | v2 | Improvement |
|---|---|---|---|
| Product DB Size | 80K | 440K | 5.5x expansion |
| Data Quality | Inaccurate filtering | 700K → 440K quality filter | Removed low-quality products |
| Segmap Quality | Low | Improved | VLM-based verification pipeline |
| Post-processing | None | Category Boost | Category-aware re-ranking |
| VLM Refinement | QWEN3 8B (1 week+, 2 GPUs) | GPT-5-nano + reasoning (2 days, API parallel) | 3.5x faster, higher accuracy |
Segmap Refinement Pipeline
- IoM-based Merging: Automatic merging of overlapping instances
- VLM Category Verification: Filtering incorrectly detected objects via vision-language models
- Representativeness Scoring: Prioritizing search-suitable segments
Experiment Results
Best configuration: SAM3 bbox → Full Image Search + Category Boost
| Configuration | DetectRate@10 | Hit Rate@10 | MRR |
|---|---|---|---|
| SAM3 bbox → Full Image + Category | 28.08% | 33.06% | 0.157 |
| OWLv2 bbox → bbox crop + Category | 26.56% | 30.20% | 0.166 |
| SAM3 bbox → segmap crop + Category | 26.28% | 30.43% | 0.152 |
| Baseline (naive SigLIP2) | 2.06% | 2.06% | 0.011 |
Key findings:
- Bbox crop outperforms segmap crop as query (+7.6%p)
- Full product image indexing outperforms cropped indexing
- Weak filtering (0.01) outperforms strong filtering (0.05) — excessive filtering excludes correct answers
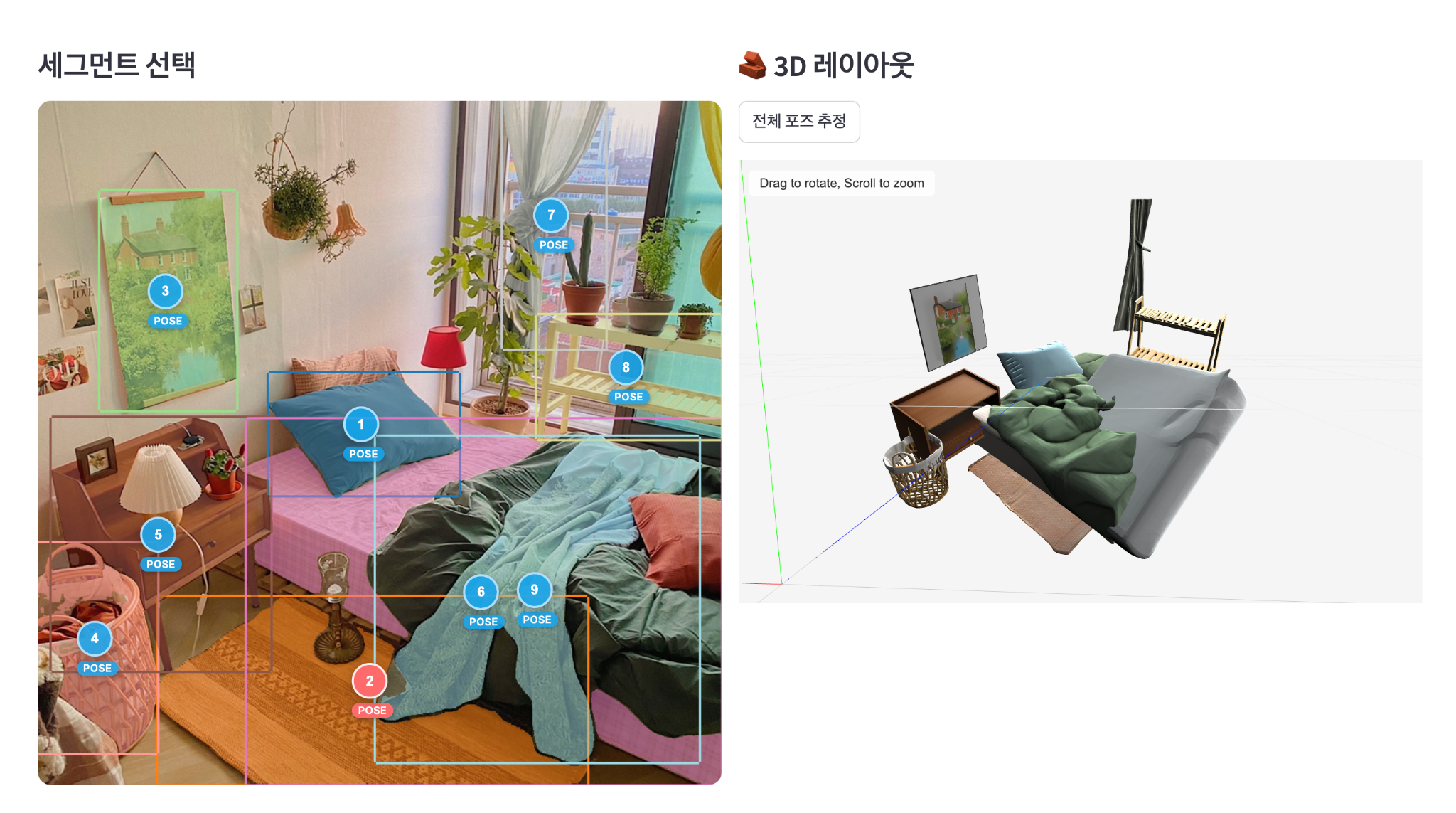
3D Digital Twin Extension
Retrieved products can be further transformed into 3D objects for digital twin placement, collaborated with the XR team for top-N segment 3D reconstruction.

Tech Stack
- Embedding Model: SigLIP2
- Object Detection: SAM3, OWLv2
- VLM Refinement: GPT-5-nano (reasoning), QWEN3 8B Instruct
- 3D Reconstruction: SAM3D Pipeline
- Search Infrastructure: ElasticSearch (vector KNN)
- Evaluation: DetectRate@K, Hit Rate@K, MRR
Period
December 2025 - January 2026 | Bucketplace (오늘의집)